

为了使车辆实现自主驾驶,它需要多个不同类型的传感器来提供有关其周围环境的同步数据流。视觉系统本身无法为车辆提供足够的环境来安全地自主运行。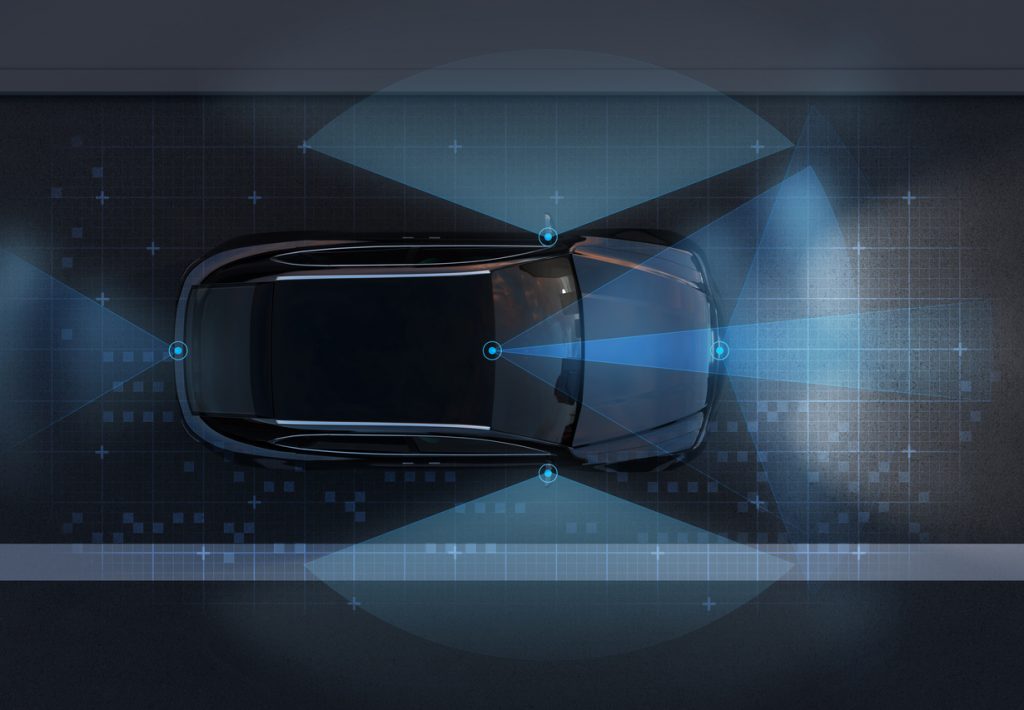
光检测和测距(LiDAR)系统已成为任何自动驾驶车辆(无论是无人机,汽车还是卡车)的重要组成部分。LiDAR提供有关车辆周围环境的信息,即使在恶劣的天气条件下,雷达和视觉系统也无法提供这些信息。
那么,这两个系统如何一起使用来创建自主导航?
视觉系统如何在自动驾驶汽车中使用
首先,了解自动驾驶汽车中视觉系统的使用方式非常重要。它们主要用于物体的检测和分类,这是任何自动驾驶汽车的一项关键任务。视觉系统通常利用先进的机器视觉算法,可以首先检测到某个对象存在,然后利用其广泛的培训来确定该对象是什么并将其转化为动作。
基于视觉的检测和分类可以包括车道发现,道路曲率估计,障碍物检测和分类以及交通标志或交通灯检测和分类以及许多其他基本任务。所有这些须以较高的速度发生,以便自动驾驶车辆可以及时做出决策。
视觉系统和LiDAR一起用于自主导航
LiDAR在恶劣的天气条件下运行,可以检测到其他物体的距离和速率,远胜于视觉系统。除了通过视觉系统收集的信息之外,这还提供了关键信息。但是,当一起工作时,这两个系统可以在任何天气下完全检测其周围环境,收集有关所有周围环境的上下文信息。
某些新的导航形式包括将视觉系统像素与LiDAR体素相结合,以便同时,更快地处理两个数据流,从而使车辆有更多时间做出重要的安全和导航决策。其他新算法可以获取这两个数据流,并将它们组合在一起,以实现车辆周围环境的高精度3D模型,从而可以在对近距离环境更加了解的情况下实现自主导航。
视觉系统和LiDAR是强大的组合。他们以许多不同的方式一起工作。目标是尽可能准确地提供尽可能多的信息,以实现自主导航。
 微信在线咨询
微信在线咨询