

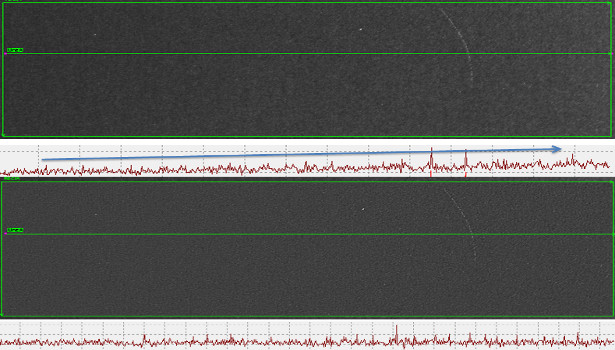
 图1.阴影校正消除了光照变化引起的缓慢强度变化(顶部图像),从而使划痕检测更加可靠(底部图像)。
图1.阴影校正消除了光照变化引起的缓慢强度变化(顶部图像),从而使划痕检测更加可靠(底部图像)。
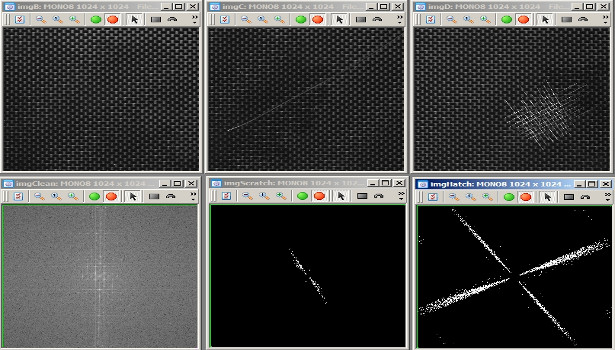 图2.上面一排(从左起):良好的零件,一次刮擦,多次刮擦。底部行(从左开始)良好部分的FFT,一次刮擦的滤波FFT,多次刮擦的滤波FFT。
图2.上面一排(从左起):良好的零件,一次刮擦,多次刮擦。底部行(从左开始)良好部分的FFT,一次刮擦的滤波FFT,多次刮擦的滤波FFT。
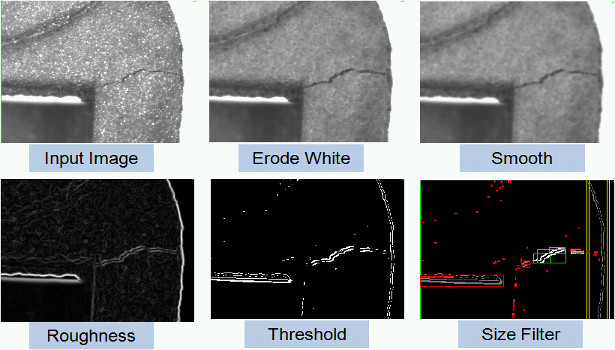 图3.通过形态学和其他方法检测到粉末金属零件中的裂纹。
图3.通过形态学和其他方法检测到粉末金属零件中的裂纹。
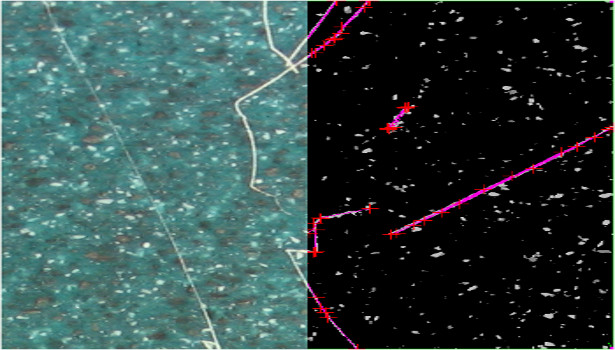 图4.通过变换检测到的带纹理的台面材料的划痕(样品右侧的洋红色线)。
图4.通过变换检测到的带纹理的台面材料的划痕(样品右侧的洋红色线)。
对于人或机器视觉来说,检测产品表面缺陷(例如变色,灼伤,裂纹和划痕)是一项艰巨的任务。这些缺陷可能具有随机的形状和较低的对比度,并且常常被产品的自然表面纹理或图案所遮盖。使用机器视觉检测这些缺陷需要了解缺陷的外观,对照明,相机分辨率和零件展示以及精密的机器视觉算法的关注。
在这里,我们讨论裂缝和划痕,这些裂缝和划痕的强度会快速变化,从而产生较高的空间频率。
了解任务
了解这些缺陷是如何发生的,可以使您对缺陷在图像中的显示方式有所了解。例如,金属粉末(烧结)零件可能仅在材料较薄的地方开裂。通过将机器视觉分析限制在发生缺陷的区域,结构和方向,这种“先验知识”可以提高缺陷检测的可靠性。
目前如何检测?如果是通过机器视觉完成的,那么当前系统的不足之处是什么?当机器视觉取代人工检测时,询问检测员他们如何完成任务并观看他们的工作。例如,要检测光滑塑料上的划痕,检测员可能会转动零件直到划痕“亮起”。
我们通过直观地了解和通过培训了解这些缺陷的外观来检测表面缺陷。例如,划痕通常表现为一系列笔直或逐渐弯曲的线段,这些线段我们利用“格式塔”功能下意识地连接到一条线中。对于机器视觉,这些功能须通过视觉算法来近似。
在艰巨的检测任务上,人类检测员的决定可能会不同意-是碰巧出现的划痕还是只是一些亮点?这是警告,可能无法进行可靠的缺陷检测。如果缺陷很清楚并且构成缺陷的要素得到了明确规定,那么机器视觉比人类视觉可以做出更一致的决策。
在表面缺陷检测中,照明尤为重要,因为这些缺陷通常对比度很低,因此适当的照明可以放大。对于提高平面高度的缺陷,请尝试使用低角度照明来“照亮”凸起区域的边缘。对于平坦的缺陷,或在曲面上查找缺陷时,请尝试散射光。如您所知,照明有点像艺术。向您的照明供应商或视觉集成商寻求帮助。
相机和镜头在裂痕或刮痕上的图像须达到三个像素或更多。有时需要多个摄像头或跨步零件才能以所需的分辨率检测零件的整个表面。因为我们正在寻找小的缺陷,所以使零件表面保持清晰的焦点非常重要。当零件表面弯曲时,这可能是一个挑战。
阴影校正
有了清晰的零件和缺陷零件的清晰图像,您就可以尝试各种机器视觉算法。包含此类算法的软件可以轻松尝试不同的解决方案,并且对于检测裂纹和划痕非常有用。
如果刮擦或裂纹的强度远高于或低于零件的自然纹理,则检测任务似乎很容易:应用强度阈值以仅显示刮擦或裂纹的像素,而这些像素的数量就是缺陷信号。
但是,超出阈值的像素值可能是由于照明不均匀,而不是划痕或裂缝。阴影校正可消除照明的变化,从而改善裂纹和划痕的检测。阴影校正通常通过空间频率滤波或通过将输入图像除以参考图像来完成。
空间高通滤波器可放大高空间频率的裂纹和划痕,并消除由于照明强度变化而引起的低频变化。该过滤器会破裂和刮擦检测。不幸的是,它还会放大零件的表面纹理,从而产生嘈杂的图像,可能使划痕或裂纹检测变得困难。
代替放大高空间频率,我们可以减去低空间频率。首先,通过平均每个像素周围的像素强度,根据输入图像制作低通(模糊)图像。这些局部平均值近似于缓慢变化的光强度。接下来,从输入图像中减去低通图像,留下高空间频率变化(划痕和裂缝),而强度背景几乎保持不变。
甲参考图像是通过在时间上平均化的图像的序列,而不代替一部分创建。参考图像显示照度分布。随后的输入图像除以参考图像,以消除照明的影响。由于图像强度是照明度和零件的反射率或透射率的乘积,因此参考图像的逐像素除法会抵消照明因子,仅留下零件的反射率或透射率。该方法通常用于显微镜检测,但在生产线中较少使用。
黄金参考方法
大多数零件的反射率或透射率变化会掩盖划痕和裂纹。我们可以通过平均已知好零件的准确对齐图像(而不是空图像)来扩展参考图像的概念,以产生黄金参考图像。整体方差给出了零件上每个点的自然或可接受变化的估计值。
从输入零件图像中减去或分割该黄金参考,以消除照明变化和零件反射率或透射率变化。方差度量用于设置图像中每个点的检测阈值。当零件强度结构受到非常严格的控制时(例如,使用半导体),此方法效果很好。黄金参考图像和零件输入图像还须在位置,旋转和比例上准确对齐。
匹配过滤器去除重复图案
黄金参考方法有时可以删除重复的零件图案,例如网格或网格。但是,如果零件的结构和反射率或透射率不受严格控制,则黄金方法会发出错误警报。在这些情况下,匹配的滤波器可能会产生更好的结果。
基本思想是构建一个与零件重复图案的空间频率分量匹配的滤波器,然后应用该滤波器滤除图案,使表面缺陷大部分保持完好无损,从而优化表面缺陷的信噪比。使用匹配滤镜的优点包括对滤镜和输入图像之间的对齐不匹配具有一定的容忍度,并且通过归一化可以对图案强度变化具有容忍度。
使用快速傅立叶变换(FFT)将重复图案的已知良好图像转换为空间频率空间,以制成匹配滤波器。然后将FFT应用于输入的零件图像。现在,在空间频域中,我们将输入图像除以匹配的滤波器,从而有效地去除了输入图像中与匹配的滤波器的频率匹配的空间频率。如果我们不在乎表面缺陷的位置和结构,那么有时可以在空间频域中检测到缺陷。或者,我们使用逆FFT构造没有重复图案结构的空间强度图像,并在空间域中进行检测。
如果缺陷中的空间频率与滤波器中的空间频率重叠,则缺陷将被部分擦除。如果有足够的重叠,则滤波后的信号将不足以提供可靠的缺陷检测。
结构方法
即使使用上述方法,缺陷信号通常仍然太弱而无法可靠检测。结构方法使用缺陷结构的先验知识来改进检测。例如,划痕在图像中显示为大约在一条线上的点。通过放大或累积沿线的点,我们可以提高此类缺陷的检测可靠性。这是许多结构方法中的两种。
数学形态学可以修改并检测图像中的形状(形态)。该侵蚀操作“剥离”从明亮的物体边缘像素。扩散操作将像素添加到明亮的对象。假设划痕比其上的物体亮,并且我们知道划痕的大致方向。然后,使用方向性扩展,我们可以扩展并“填充”草稿中的点,以便它们接触。然后,方向腐蚀可以选择“使”结果线“变细”,以减少“变色”的噪声像素。假设您事先了解一些缺陷结构,则可以使用许多其他形态运算符来改进缺陷检测。
在变换中,高于阈值的每个像素都会对其进行投票以对所有可能的行进行投票。具有足够投票数(高于阈值)的可能线条表示图像中的划痕或裂缝像素线。盈泰德方法能够检测非常弱的线信号,因为它们整合了许多像素上的线的证据。它们在某些情况下效果很好,但通常设置缓慢或太难。
每一个新的表面缺陷都是一个挑战,但是凭借经验和正确的工具,这是可以解决的。如果您在这方面有需求,我们十分欢迎您咨询!
 微信在线咨询
微信在线咨询