

利用机器视觉边缘检查的尺寸检查是图像传感器的应用趋势。图像传感器可以将检查对象在平面上表现出来,通过边缘检测,测算位置、宽度、角度等。
下面将按照处理过程来介绍边缘检查的原理,这将有助于优化检查设置。除此之外,还将介绍一些有性的边缘检查的例子以及可以稳定检查效果的预处理滤镜的选择方法。
边缘检测的原理
所谓边缘是指图像内明亮部位与阴暗部分的边缘。边缘检测是通过视觉系统来检测这种浓淡变化的边缘。
可以通过下列4个过程来得到边缘。
(1)投影处理
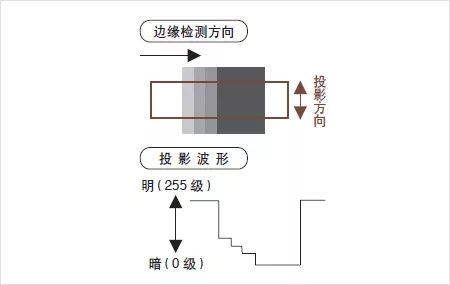
对于测量区域内的图像进行投影处理。投影处理是相对于检查方向进行垂直扫描,然后计算各投影线的平均浓度。投影线平均浓度波形被称为投影波形。
什么是投影处理?
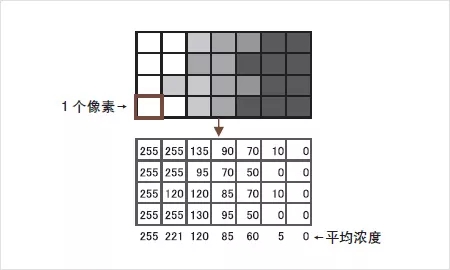
计算投影方向的平均浓度。
可以减少区域内的噪点造成的检查错误。
(2)微分处理
根据投影波形进行微分处理。可能成为边缘的、浓淡变化较大的部位,其微分值也较大。
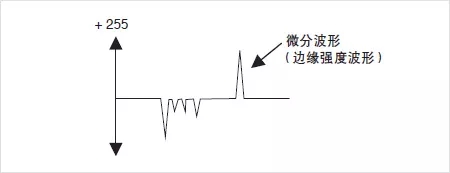
什么是微分处理?
计算浓淡(级)变化量的处理过程。
可以消除区域内浓度值的变化所导致的影响。
例:没有浓淡变化的部位的微分值是0。
白色(255)→黑色(0) 时的值是-255。
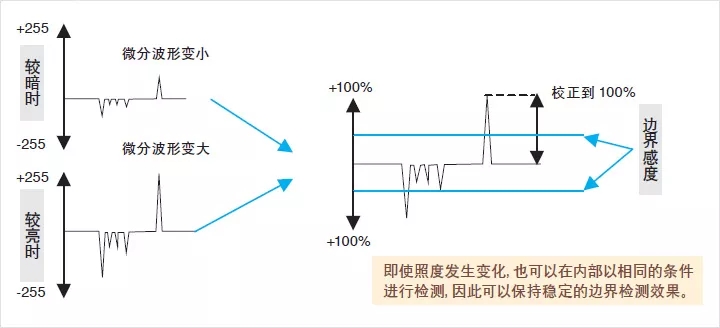
(3)通过校正使微分值达到100%
在实际生产线上,为了使边缘达到稳定的状态,通常会进行适当的调整以使微分值达到100%。
将超过预先设置的“ 边缘感度(%)”的微分波形的峰值作为边缘位置。根据浓淡变化峰值的检测原理,在照度经常发生变化的生产线上也可以稳定的检测出边缘。
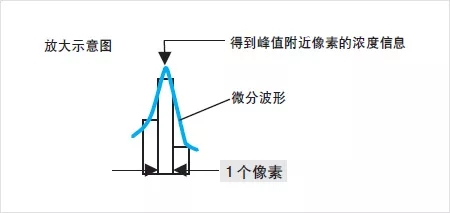
(4)亚像素处理
对于微分波形中部分的中心附近的3个像素,根据这3个像素形成的波形,进行修正演算。以1/100像素为单位测算边界位置(次像素处理)。
 微信在线咨询
微信在线咨询